 16.1 °C
16.1 °C

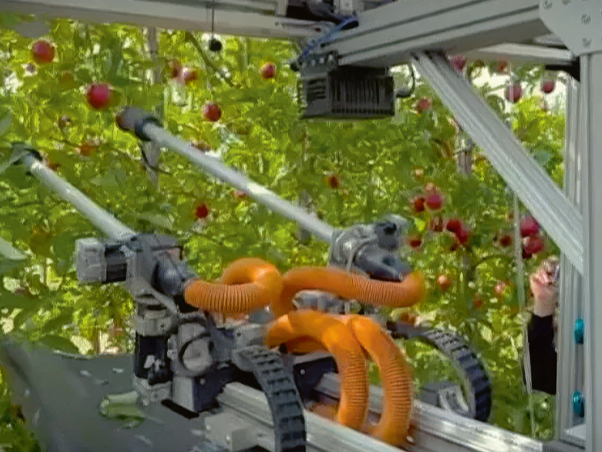
USDA Lauksaimniecības pētījumu dienesta (ARS) pētnieki sadarbībā ar Mičiganas štata (ASV) universitāti izstrādājuši jaunu augļu novākšanas robotu, kas aprīkots ar divām rokām.
Testos jaunā sistēma uzrādījusi ievērojami augstāku efektivitāti salīdzinājumā ar vienas rokas robotiem.
Šīs izstrādes mērķis ir palielināt produktivitāti un samazināt izmaksas augļu audzēšanā, norāda ARS pētnieki. Procesa automatizācija ir kritiski svarīga nozarei, jo darbaspēka izmaksas ražas novākšanas laikā ir lielākie izdevumi ābolu un citu augļu ražošanā, liecina SEEDS. Jaunā robota konstrukcija piedāvā komerciāli dzīvotspējīgu risinājumu, kas nodrošina ASV ābolu nozares ilgtermiņa ilgtspējību un globālo konkurētspēju.
Jaunais robots ir aprīkots ar diviem manipulatoriem ar četrām brīvības pakāpēm, kas ļauj tam efektīvi manevrēt cauri blīvām koku lapotnēm.
Izmantojot ToF kameru un neironu tīklu kombināciju, iekārta atpazīst ābolus pikseļu līmenī un izveido precīzu augļudārza 3D modeli.
Smalkai augļu novākšanai tiek izmantoti mīksti satvērēji un inteliģenta vakuuma sistēma, kas automātiski pielāgo sūkšanas jaudu.
Mūsdienu augļudārzos novākšanas veiksmes rādītājs ir 82%, un viena augļa apstrādes laiks ir aptuveni sešas sekundes. Divu roku izmantošana ir palielinājusi produktivitāti par 34% salīdzinājumā ar iepriekšējiem modeļiem.
Izvēlies savu soctīklu platformu, lai sekotu LASI.LV: Facebook, X, Bluesky, Draugiem vai arī Instagram. Pievienojies mūsu lasītāju pulkam, lai saņemtu īpaši tev atlasītu noderīgu, praktisku un aktuālu saturu.
Pieraksties LASI.LV dārza darbu kalendāra vēstkopai šeit.
Pieraksties vēstkopai un reizi nedēļā saņem LASI.LV atlasītus rakstus par dārza, dabas, recepšu tematiku.
Ko tu saņemsi:
🌱 Noderīgus padomus par dārza un mājas kopšanu, aktuālo dārza darbu kalendāru
🍏 Sezonālas un veselīgas receptes
🐾 Ieteikumus par mājdzīvnieku aprūpi
🌿 Stāstus par Latvijas dabu un vidi
⚖️ Praktisku informāciju par tiesībām un ikdienas jautājumiem
















































.")


































 pētniece un selekcionāre Vija Strazdiņa.")
















 Stratēģisko klientu vadītājs: \"Līdz šim sistēmas operators atsevišķi uzskaitījis un analizējis neplānotos elektroenerģijas piegādes pārtraukumus ar ilgumu virs 24 stundām. Šogad tādi bijuši 40 objektos.\"")














































 būs iespējams sējumos sastapt ar putošo melnplauku inficētas miežu vārpas un auzu skaras.")
")


















































, taču talkā nāk arī dzīvesbiedre Elīna (vidū) un abas meitas – Dārta un Austra.")











































: ZS \"Tiltgaļi\" saimniece Sandra Boša, Holšteinas šķirnes lopu audzētāju asociācijas izpilddirektore Ieva Krustiņa, jaunie lauksaimnieki Gints Grandbergs no ZS \"Dukāti\", Jēkabs Vikmanis no ZS \"Sporas\" un Holšteinas lopu audzētāju asociācijas ciltsdarba speciāliste Liene Censone.")
, Ričards Ramiņš, Kristers Vorobjovs, Māris Jānis Zuments un Krista Krūmiņa profesiju apgūst ar prieku. Jaunieši fotografējoties atveido Kandavas Lauksaimniecības tehnikuma nosaukuma pirmos burtus – KLT.")













